일반
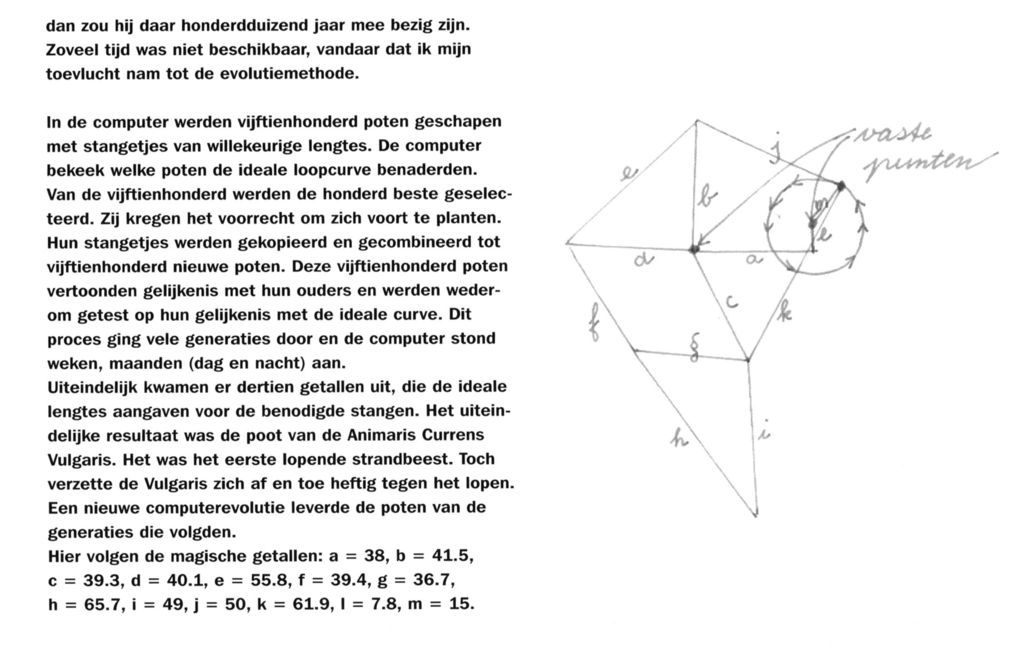
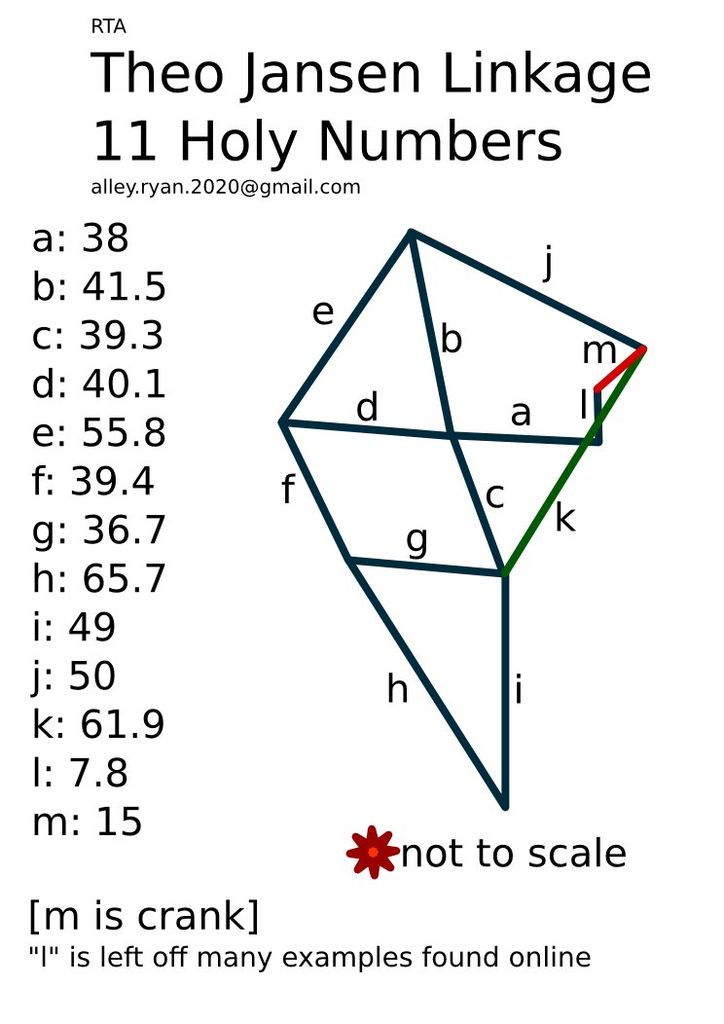
테오 얀센 메커니즘 Teo Jansen mechanisom
by Dreamy posted Jun 08, 2016
http://www.mechanicalspider.com/comparison.html
|
Articles

Designed by sketchbooks.co.kr / sketchbook5 board skin
Sketchbook5, 스케치북5
Sketchbook5, 스케치북5
Sketchbook5, 스케치북5
Sketchbook5, 스케치북5